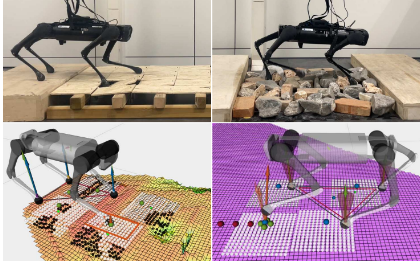
Load-bearing Assessment for Safe Locomotion of Quadruped Robots on Collapsing Terrain
Vivian S. Medeiros, Giovanni B Dessy , Thiago Boaventura, Marcelo Becker, Claudio Semini, Victor Barasuol. IEEE Robotics and Automation Letters,2025.
PhD Student
Interested in legged robots, locomanipulation, and human-robot collaboration.

PhD Researcher
I am a PhD student at the Istituto Italiano di Tecnologia (IIT) in Genoa, Italy, working in the Dynamic Legged Systems Lab. My research focuses on legged robotics, particularly locomotion, locomanipulation, and human–robot collaboration. I am currently exploring new strategies that enable legged robots to navigate and manipulate objects in complex, dynamic environments, with the broader goal of achieving more seamless human–robot interaction. I see myself as a proactive and enthusiastic researcher, always eager to learn and contribute to different projects. I’m also a very hands-on, crafty person who enjoys working with both hardware and software. Outside the lab, I love motorbikes—both riding and working on engines—which helps with my practical mindset at work. My hobbies also include cooking, hiking, reading all kinds of books, and, more recently, rock climbing.

Locomotion, Loco-Manipulation, Quadrupeds
MPC, RL ,Multi-Robot

Interaction, Carrying, Communication
Vivian S. Medeiros, Giovanni B Dessy , Thiago Boaventura, Marcelo Becker, Claudio Semini, Victor Barasuol. IEEE Robotics and Automation Letters,2025.
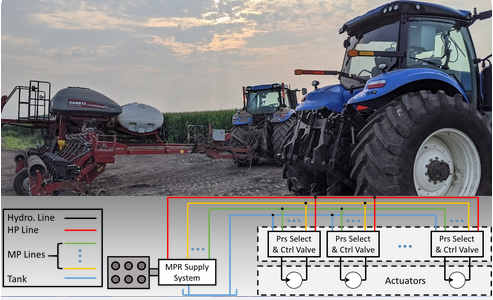
X. Tian, X. Guo, P. Stump, Dessy, Giovanni , A. Vacca, S. Fiorati, F. Pintore International Journal of Fluid Power,2024.
I'm actively looking for new opportunities and collaborations. Feel free to reach out!