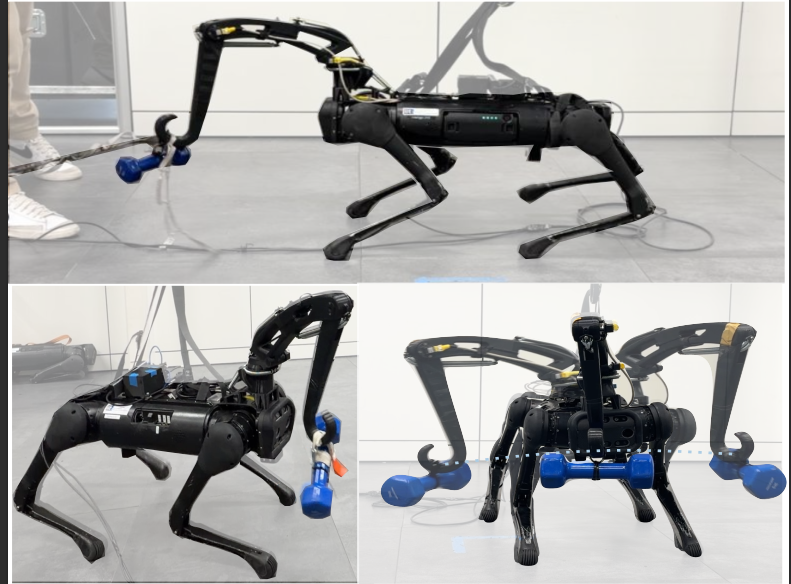
ZiMPedance: Impedance-Aware ZMP Modeling and Control for Payload Carrying
Giovanni B. Dessy, Claudio Semini, Victor Barasuol.
PhD Student
Interested in legged robots, locomanipulation, and human-robot collaboration.

PhD Researcher
I am a PhD student at the Istituto Italiano di Tecnologia (IIT) in Genoa, Italy, working in the Dynamic Legged Systems Lab. My research focuses on legged robotics, specifically locomotion, locomanipulation, and human–robot collaboration. I develop advanced control methodologies—ranging from Model Predictive Control (MPC) to Reinforcement Learning (RL)—to enable quadrupeds and humanoids to navigate and manipulate objects in complex, dynamic environments safely.
I see myself as a proactive, hands-on researcher who thrives at the intersection of hardware and software. Whether I am tuning simulation environments or writing Python and C++ implementations to deploy algorithms directly onto physical robot hardware, I am driven by the challenge of bridging the gap between theoretical math and real-world mechanics.
Outside the lab, my practical mindset carries over into my love for motorbikes—both riding them and stripping down engines to rebuild them. When I'm not turning a wrench or writing code, you can find me cooking, hiking, reading, or rock climbing.
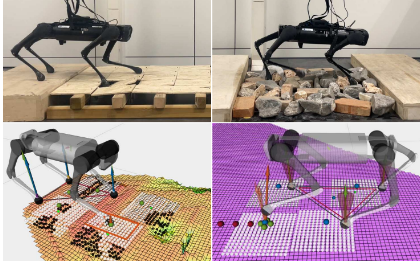
Presenting the Load-bearing Assessment for Safe Locomotion of Quadruped Robots on Collapsing Terrain at the IEEE International Conference on Robotics and Automation (ICRA) 2026.

Locomotion, Loco-Manipulation, Quadrupeds & Humanoids
MPC, WBC, RL, Single Rigid Body Dynamics

Interaction, Payload Carrying, Communication
Giovanni B. Dessy, Claudio Semini, Victor Barasuol.
Vivian S. Medeiros, Giovanni B. Dessy, Thiago Boaventura, Marcelo Becker, Claudio Semini, Victor Barasuol.
IEEE Robotics and Automation Letters (RA-L), 2025.
I'm actively looking for new opportunities and collaborations. Feel free to reach out!